
Duke University's Argus Robot: A New Paradigm in Robotics
Most robots are built to resemble biological forms, from human skeletons to dog gaits. Engineers have long relied on these templates, assuming a robot needs a front, back, and preferred direction. A team at Duke University's General Robotics Lab has directly challenged this assumption, creating a machine that looks and moves unlike any before.
Argus: The All-Seeing Robot
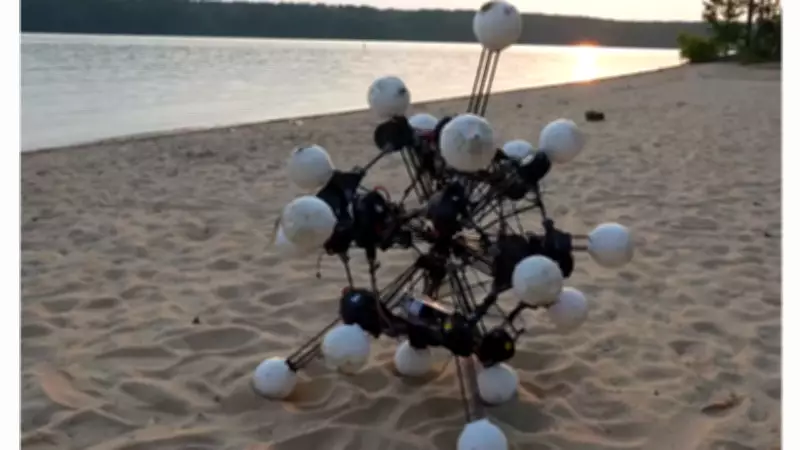
Named after the all-seeing giant of Greek mythology, Argus features 20 modular, telescoping legs radiating from a central core, each tipped with a depth camera. This gives it a nearly complete spherical field of view, with no front, back, top, or bottom. It can walk, roll, climb, stabilize, and manipulate objects in any direction without turning. The research, led by Professor Boyuan Chen with doctoral student Jiaxun Liu and postdoctoral researcher Boxi Xia, was published in Science Robotics.
Dynamic Isotropy: The Design Principle
The conceptual foundation is dynamic isotropy, which measures how uniformly a robot can accelerate in any direction, scored from 0 to 1. Most advanced robots score below 0.6, but Argus achieves 0.91, approaching the theoretical ceiling. As Chen stated: "When a robot can accelerate equally well in every direction, it stops needing to face the world in any particular way."

Dodecahedron Geometry for Symmetry
To achieve this score, the team ran over 1,500 simulated configurations. The winning design placed 20 cable-driven legs at the vertices of a regular dodecahedron, a 12-faced solid. This arrangement provides uniform force distribution and visual coverage. Each leg telescopes and carries a depth camera, allowing perception to match physical reach. The robot resembles a sea urchin, a resemblance noted in the study, as both use the same geometric principle for mechanical consistency.
Real-World Testing and Performance
Argus was tested extensively across Duke's campus and surrounding terrain. It navigated concrete, grass, dense foliage, soft sand, wet surfaces, and tree bark without losing stability. It cleared obstacles up to five inches tall, climbed vertically between parallel walls, carried a ten-pound payload, and pushed a large cube while rolling. Liu commented: "The first time we saw it navigate among trees and rough terrain, even under heavy collisions, we knew this was something different."
Resilience to Damage
Argus's 20 legs each contribute a fraction of locomotion, distributing force evenly. This makes it tolerant to motor failure or leg breakage, unlike robots with fewer limbs. The design ensures no single component is critical, allowing continued function despite partial failure.
Future Implications
Argus is a proof of concept, but its implications are substantial. Xia noted that dynamic symmetry produces a deployable machine for real-world challenges. Chen envisions a family of dynamically symmetric robots: "Robots that don't need to imitate dogs or humans to be agile, tough and useful." Models with up to 40 legs score even higher on dynamic isotropy but remain impractical for now. The dodecahedral architecture strikes a balance between complexity and practicality.
About the Author
The TOI Science Desk is a team of journalists dedicated to covering discoveries in science, from genetic engineering to space exploration, making complex topics accessible to all readers.






